Reinforcement Learning
Policy gradient
- Play an Atari game (Pong) using deep reinforcement learning
- Algorithm:
Update per step $t$: $\theta \leftarrow \theta+\alpha\nabla_\theta \log \pi_\theta (s_t, a_t) v_t$
$s_t$: state, $a_t$: action, $v_t$: long-term value, $\pi_\theta(s,a) = P[a|s, \theta]$
- Result: Baseline: 3 points
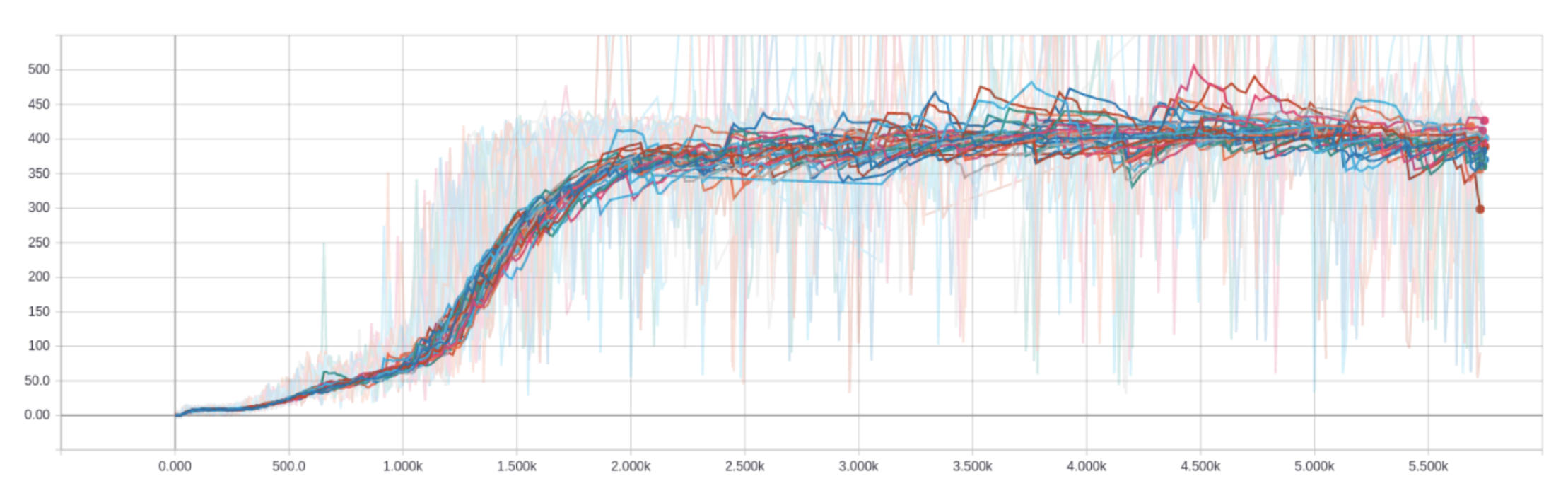
Deep Q Learning
- Environment: Breakout

- Algorithm:
- Take some action $a_i$ and observe $(s_i, a_i, s_i’, r_i)$, add it to $\mathcal{B}$ (replay buffer)
- Sample mini-batch ${s_j, a_j, s_j’, r_j}$ from $\mathcal{B}$ uniformly
- Compute $y_j = r_j+\gamma\text{max}_{a_j’}Q_{\phi’}(s_j’,a_j’)$ using target network $Q_{\phi’}$
- $\phi\leftarrow\phi-\alpha\sum_j\frac{dQ_{\phi’}}{d\phi}(s_j, a_j)(Q_\phi (s_j, a_j)-y_j)$
- Update $\phi’$: copy $\phi$ every $N$ steps
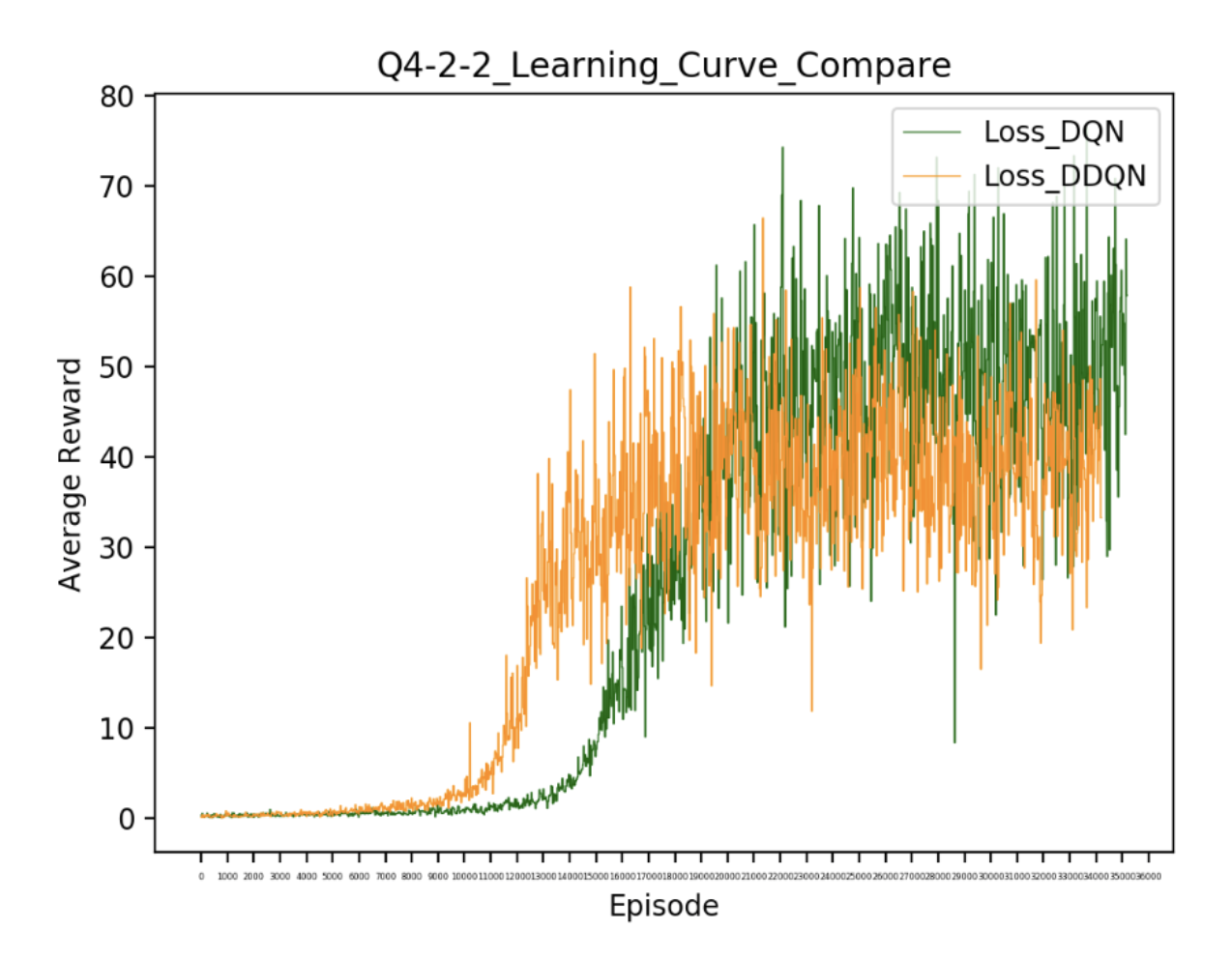
- Result: Baseline: 40 points
- Comparison between DQN and DDQN
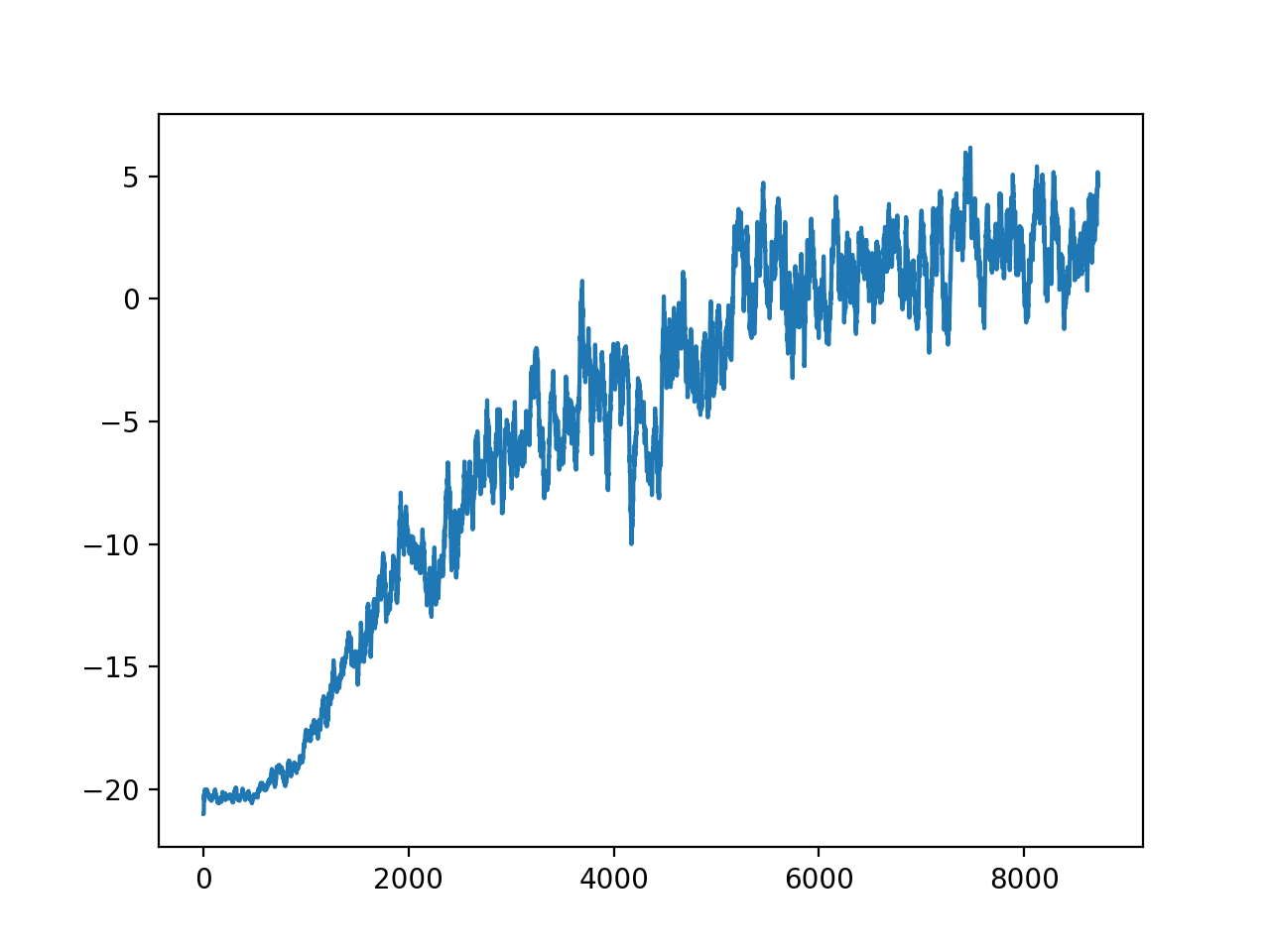
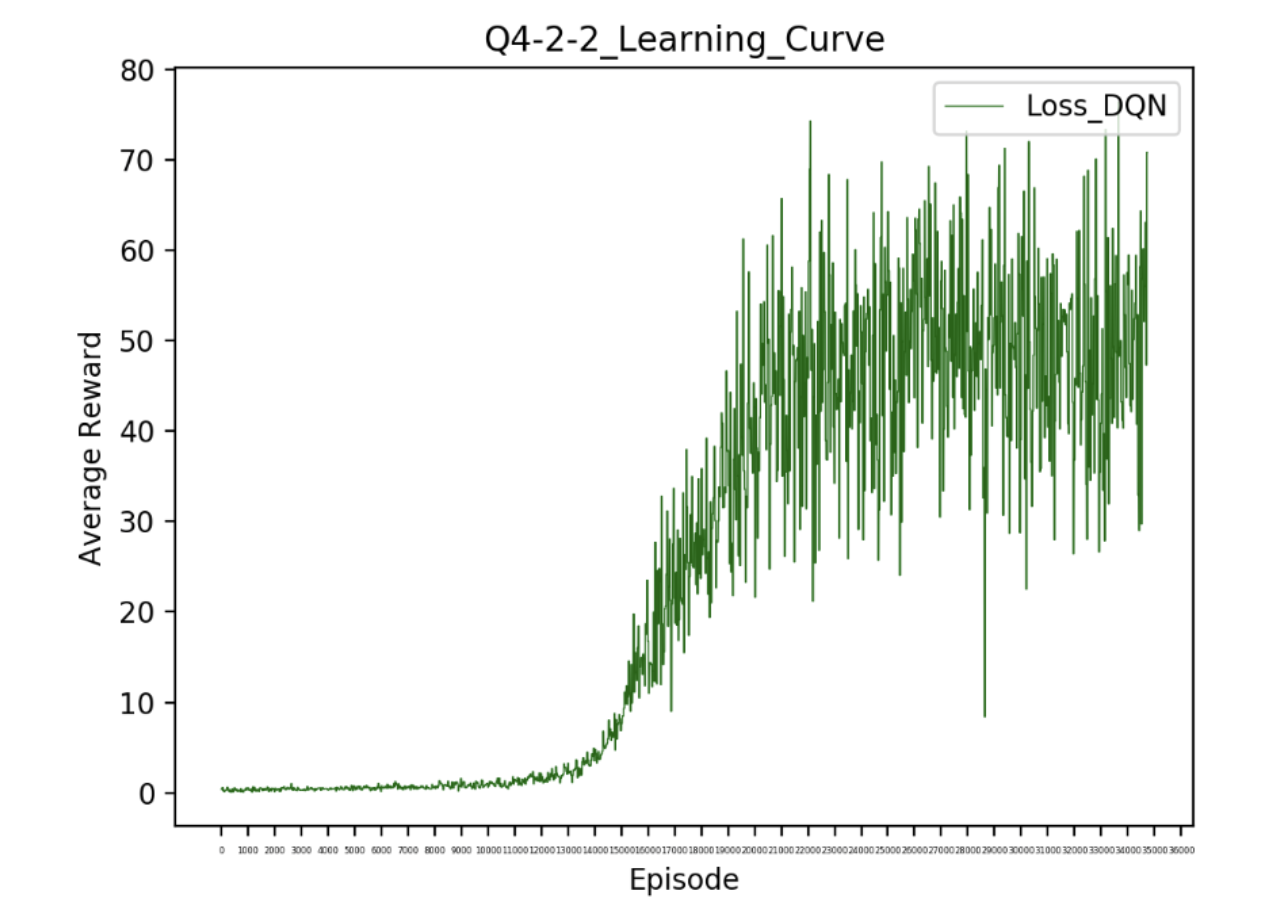
Actor-Critic
- Environment: Pong, Breakout
- Algorithm:
- Take an action $a~\pi_\theta(a|s)$, get $(s,a,s’,r)$
- Update $\hat{V}_\phi^{\pi}$ using target $r+\gamma\hat{V}_\phi^{\pi}(s’)$
- Evaluate $\hat{A}^{\pi}(s,a)=r(s,a)+\gamma\hat{V}_\phi^{\pi}(s’)-\hat{V}_\phi^{\pi}(s)$
- $\nabla_\theta J(\theta)\approx \nabla_\theta\log \pi_\theta (a|s) \hat{A}^\pi (s,a)$
- $\theta\leftarrow \theta + \alpha \nabla_\theta J(\theta)$
- Result:
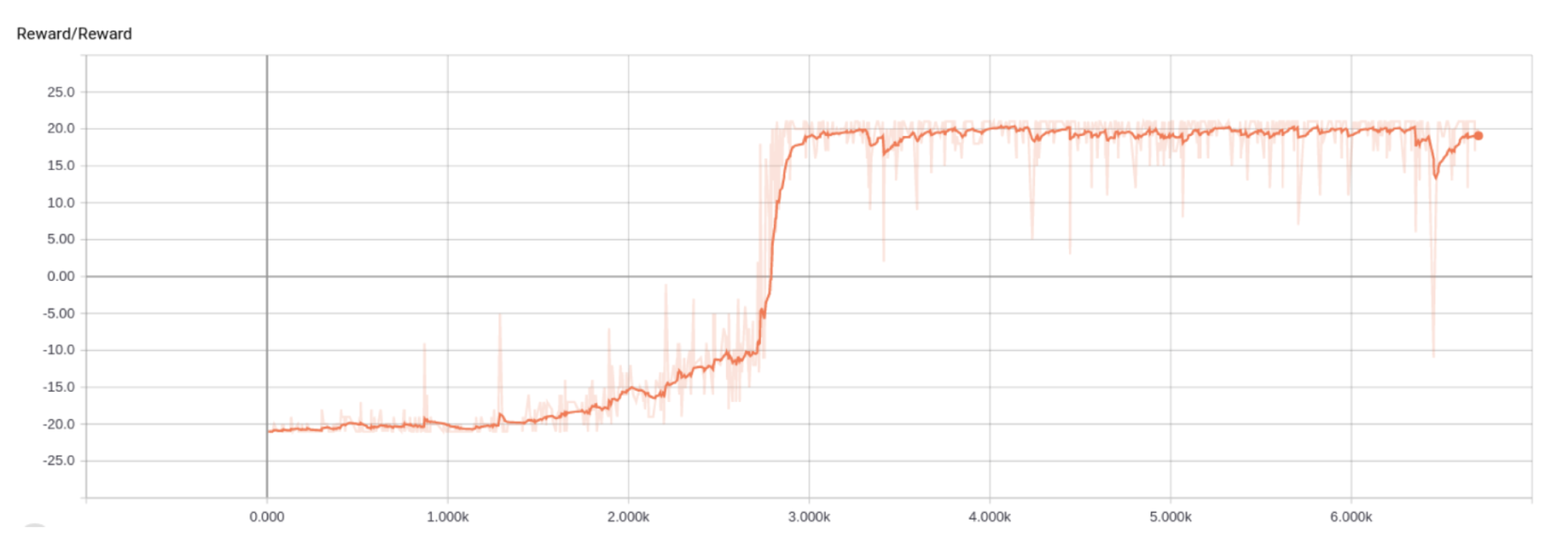
- A2C: Pong
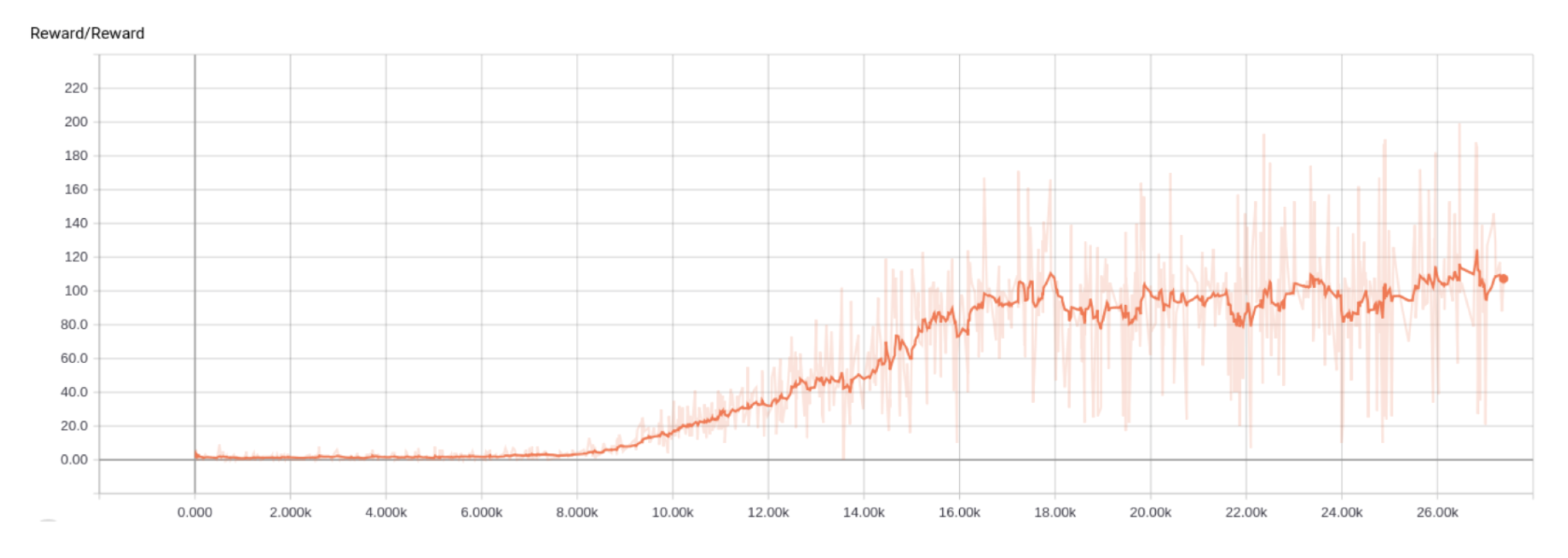
- A2C: Breakout
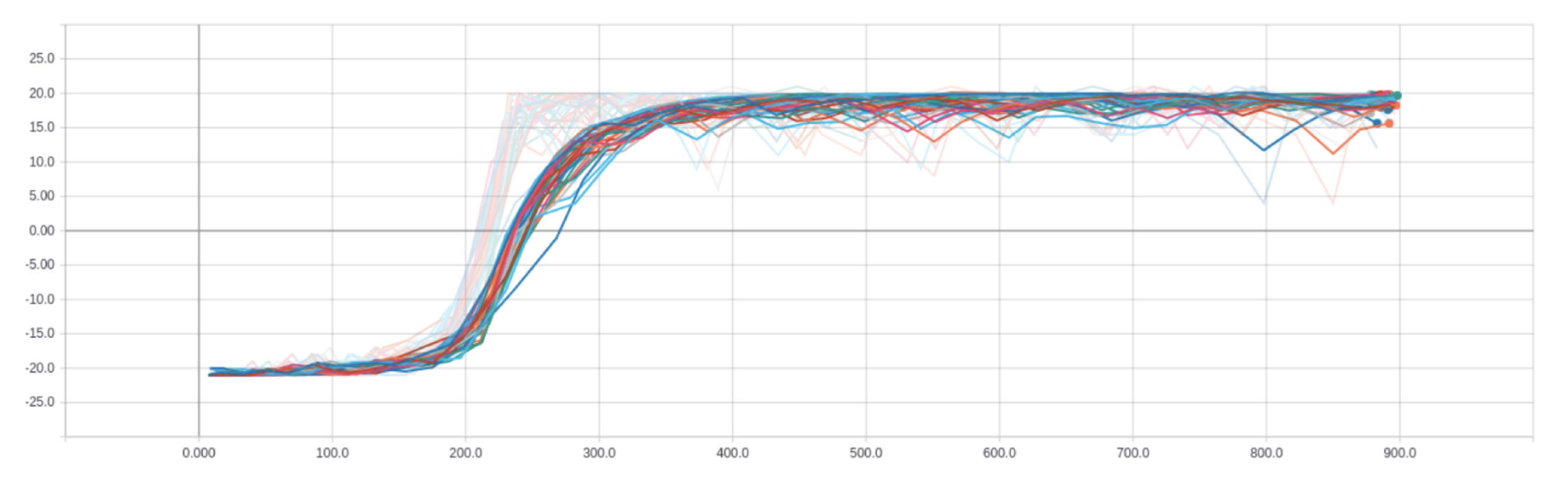
- ACKTR: Pong
- ACKTR: Breakout